
Controls
System Modeling, Frequency Domain Analysis, State-Space, Model Predictive Control, Robust and Adaptive Control, Machine Learning Control, Optimal Control, Sensor Filtering and Fusion.

Programming
Language Include:
C, C++, C#, Python, java
Game Development, OS, Baremetal
Linux, Windows, Ios, Adroid, Embedded, Web Server (Maybe)

Robotics
Wheeled Robot,
Flying Robot,
Robot Arm,
AI, Voice Command

Electronics
Random Electronics Projects,
PCB Layout and Design,
Embedded Computer Board,
Sensor Board

Brushed DC Motor Speed Control_PID
A brushed DC motor system was modeled in Matlab&Simulink in both frequency domain and time domain with input of voltage and output of motor speed. Then a PID controller was designed and implemented using an H-bridge motor driver and Arduino Uno Microcontroller. The motor speed was plotted 'real-time' through an C# application implemented on a desktop.

Single Inverted Pendulum Control
To control an inverted pendulum on a cart, a nonlinear state-space model were created and linearized. Several model based controllers were explored in Matlab&Simulink using design methods of compensator, linear quadratic regulator (LQR), and linear quadratic Gaussian (LQG). A physical system was built and the controllers were implemented onto an embedded computer.
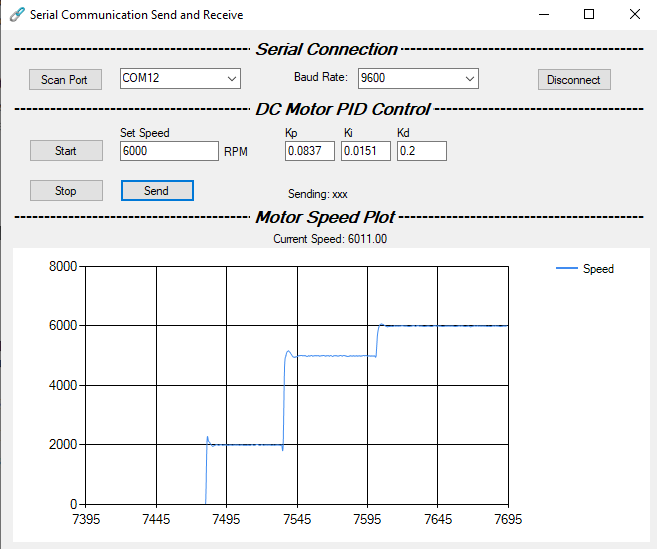
C# Motor Speed Control with Arduino Via Serial
This Program was created to send and receive data from an Arduino microcontroller via serial communication. it allows user to visually inspect the effectiveness of a discrete time PID motor speed controller.

Two Wheel Self Balancing Robot
Click edit button to change this text. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.

High Speed Logic Shifter
Click edit button to change this text. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.